




Overview
The AEDG Design team had been brought in to assist with upgrades to the Touch Hand project in preparation for a combined UKZN/NMU team's participation in the Cybathlon event originally intended for Zurich, Switzerland. The CoVid pandemic saw the event changed to an online event which was held in November at the Stopforth Research Lab at UKZN.
Up to this point, this collaborative project has seen an initial hand model designed and 3D printed (Mechatronics Masters: K Setty) with assistance from Rapid3D. This was then iterated by further design upgrades to its 4th Design iteration, most recently to also include electronics & control systems (Mechatronics Masters: K Purdon) over the last few years.
The Cybathlon event requires the participating team and their amputee team member to carry out 24 predetermined tasks across 6 stations utilizing the Touch Hand-Socket prosthetic to complete these tasks, against other competing teams from across the globe. The UKZN/NMU team are the only African entry, so not only represent South Africa but the entire continent of Africa in this exciting tournament.
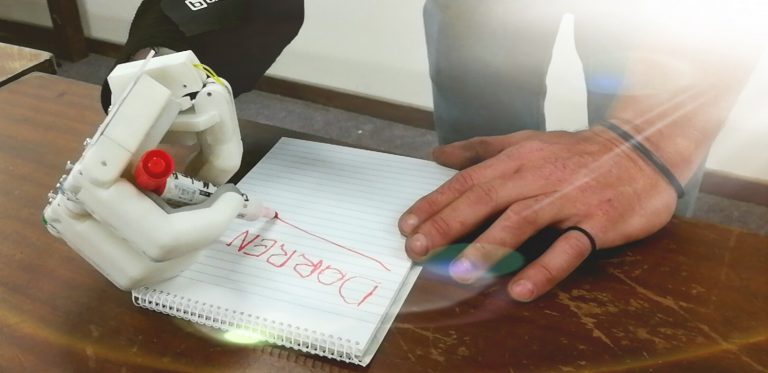
The initial task of the AEDG Design team was to further enhance the current design to make the Touch Hand even more proficient at its upcoming tasks as required by the Cybathlon, some of which are as intricate as picking up a matchstick, unbuttoning a jacket and tying a shoelace!...a serious challenge indeed.
As 2020 played out, this blog diary will keep you up to date on the progress of these design enhancements...
Initial Status
The Touch Hand (select link to read more) in its various versions had been in existence over several years now up to the point when the AEDG Team came on board in February 2020 to fast-track the preparation into the Cybathlon, as per the original brief attached to the original Masters outputs.
Previous UKZN iterations have functioned and have been tested as shown in the following photo-montage as tested by Prof Stopforth in his facility, so the basic potential was there...
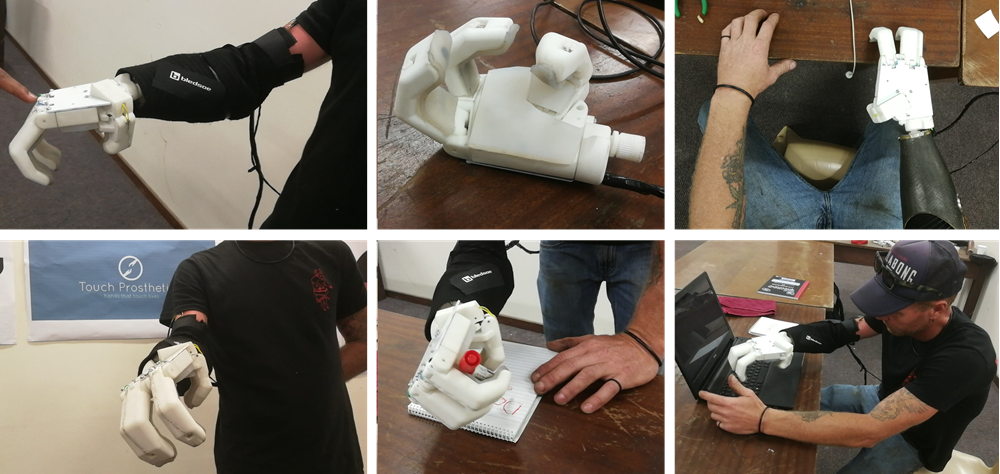
However, the status of the NMU device as handed over, was that it was in pieces, and it was not functional at all iro its proposed purpose, nor in any remote way was the device ready to complete any of the functions as required by the Cybathlon competition. It had not been tested locally with an amputee, nor could it be in its current state, and furthermore, no-one at NMU could say that they had seen the device operational! This was not what we expected when we came on board, so the challenge immediately had grown into a monster...
Project Diary
As the initial project tasks were to balloon into different areas, we will consider progress in the various sectors as they occurred in parallel per month, so the diary makes a little sense...
2020 February
General
-
initial meetings to discuss hand functionality, electronics, Cybathlon tasks, acquire existing CAD models & documents, project plan preparation.
-
meeting with Dr Bryan Theunissen (Orthopaedic Surgeon) to discuss human hand physiology, dynamics & possible limitations in the current model iro carryng out its intended tasks
-
meeting with CustomWorks' Arno Seyfert to discuss implications & possibilities of introducing composite aspects to the current design iteration to aid lightweighting & stiffness of the structure, as well as the introduction of silicon formed layers to aid functionality.
-
initial assessment of current CAD models iro integrity and motion limitations.
-
project timeline and milestones established & tasks diseminated to team members.
-
the team was divided up into different groups to focus on task completion.
Design Challenges 01
The following design challenges were immediately evident:
-
the previous Masters projects had been focused on quite specific aspects of the functionality of the hand, and there had been little integration of these aspects into it's actual real-world physical hand or its function
-
in the existing physical model, there was huge play between the 'fingers' of the hand and the 'palm' so the initial sorting of this would be a priority task.
-
the 'thumb' on the hand was positioned unnaturally iro orientation and would have to be repositioned to achieve a proper closing effect
-
the current design needed improvements iro its aesthetics to be considered as a functional 'wearable'
-
there was no plan iro the connection of the hand to the socket, so a wrist design would have to be conceptualized and manufactured
-
there were several issues with the existing CAD models, some of which would have to be redrawn from scratch
-
the motor for the wrist area appeared to have not been spec'd properly which could turn out to be a serious stumbling block
-
the wrist was unsymmetrical resulting in the operating gear being placed at an offset to the attachment; that made it rotate in more like an arc to the center, this would’ve caused moments about the center, thus making it harder to rotate the wrist
-
after going through the tasks required by the Cybathlon event, it was found that the current design and finger positioning would mean that none of the required tasks would be achievable by the current design; an entire rethink on the structure of the hand would be needed
Hand Structure
Obvious challenges with the hand structure itself was the play that existed between the digits and the knuckle structure, so, as a first target, this was to be dealt with before any serious modifications could be considered.
Further issues were encountered with the CAD files - some of them were inaccessible, others were full of errors - effectively, Zaahid had to start from scratch with these, which enabled us to attack the redesign of the basic components as part of the process.
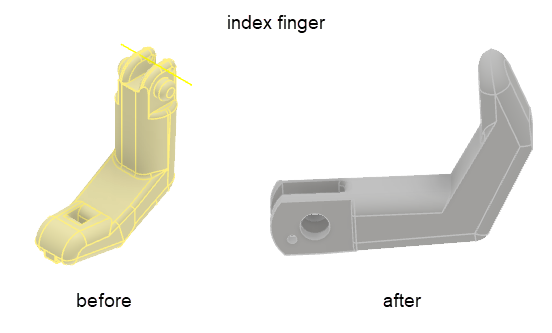
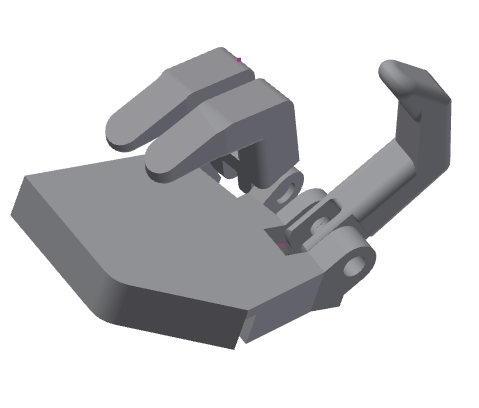
The 'index finger' was made thinner, sleeker and pointier, this allowed the finger to be less bulky and ensures a finer grip when completely closed.
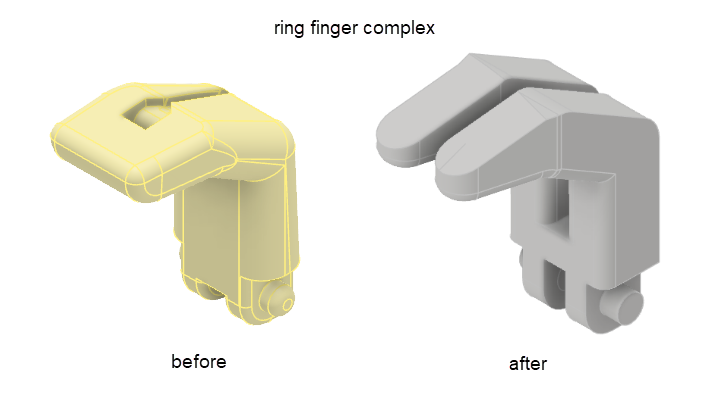
The secondary 'ring finger' complex was made to look aesthetically better by becoming two joined fingers and also made less bulky, whilst still being actuated with one linear actuator. Angles between the fingers also had to be readjusted to accommodate proper fitment on closing.
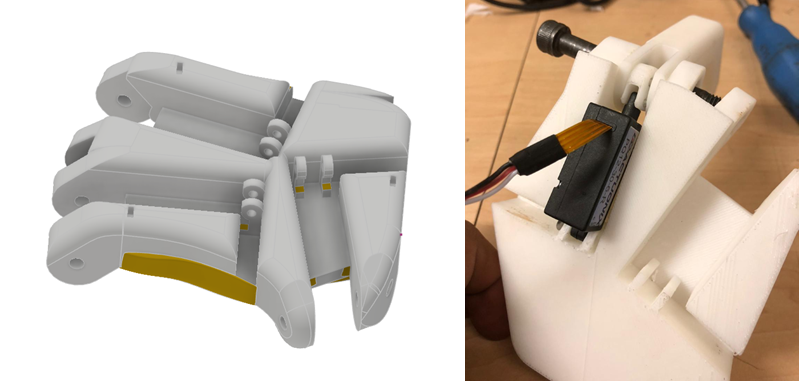
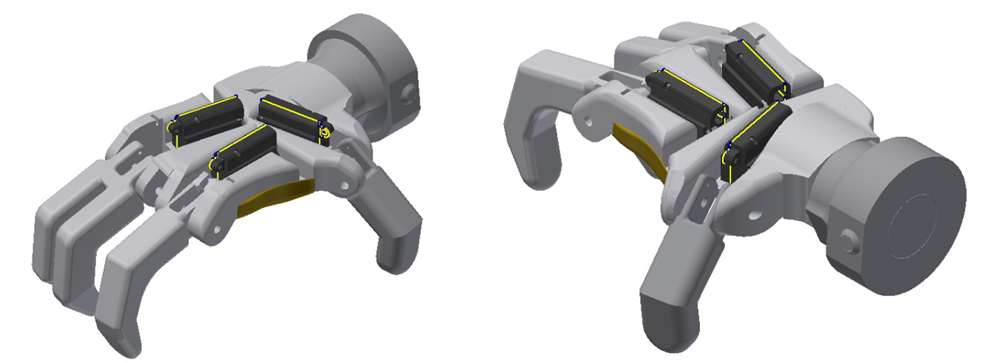
The picture below shows the intermediate assembly of all the components; the thumb has been excluded for the time being while all play issues are sorted, and the thumb orientation angle must be changed and the thumb itself has to be redesigned in the next phase.
Wrist Structure
The wrist structure was thrust upon the team as an unexpected bonus(!) as the design and development of this was not part of the team's original involvement. However, we were able to kill two birds with one stone here, and include it into a project for the Design module, and both Jode Fourie and Daniel Trask were able to take on the challenge and get assessed for it academically as well.
Concepts
The initial challenge was to create concepts with the following global guidelines:
-
the wrist had to fit seamlessly into both the hand and the socket
-
it has to have aesthetically pleasing looks
-
it had to accommodate rotational re-positioning
-
it had to be modular - ie. it had to accommodate future upgrading capability and multi-level sophistication
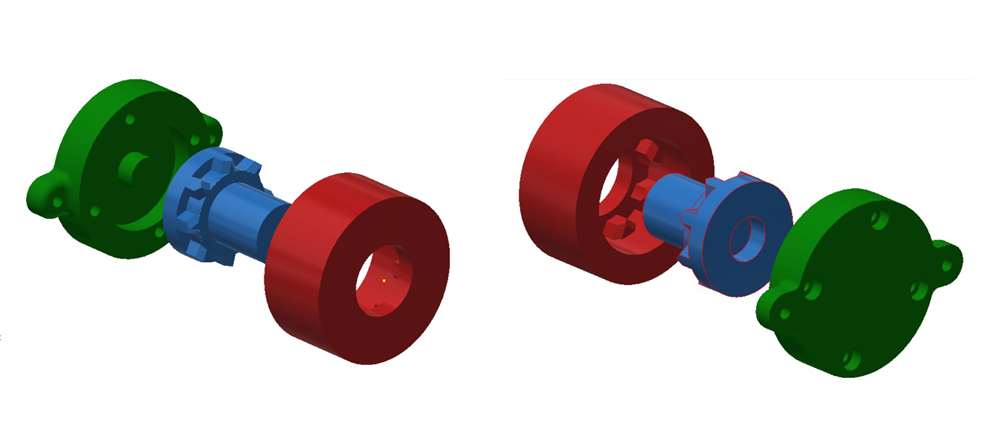
with this is mind, the initial concepts produced were as follows:
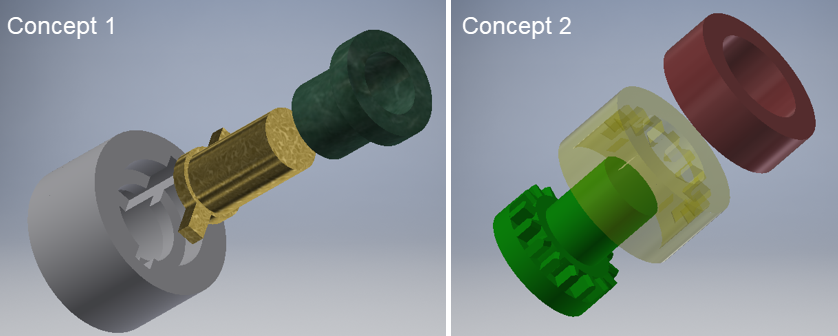 Concept 1:
Concept 1:
-
A spring loaded pin used to lock the hand and the arm.
-
The pin could be adjusted and locked in a different position to adjust the position of the hand.
Concept 2:
-
A multi-splined pin was made to allow for additional locking positions to give the amputee additional positions to move the hand to.
-
It is still spring loaded.
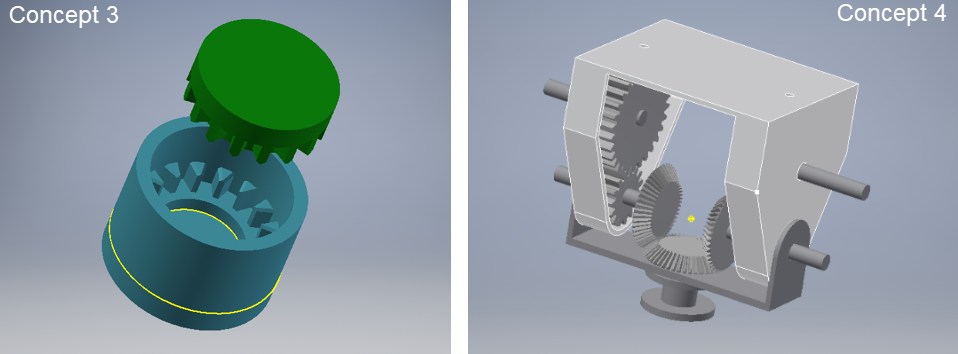
Concept 3:
-
A multi-splined cap was made to allow for additional locking positions to give the amputee additional positions to move the hand to.
-
It is still spring loaded.
-
The spring has been moved to the inside of the spline system.
Concept 4:
-
Motor powered wrist, works as a differential.
-
Two motors turn the top gears in either same or opposite direction, when turning in the same direction the bevel gears turn the whole wrist up or down.
-
When the motors turn in opposite directions the bevel gears spin the wrist around the rigid bevel gear at the bottom
These concepts would form the basis for decisions moving forward on the wrist.
Electronics & Control
This was to prove the most challenging aspect of the project initially as there was very little available information to our team members, and very little was forthcoming so it was like drawing blood from a stone! Extremely frustrating especially as we were trying to aid the whole process...
What we had was a structure in pieces, with a few dodgy actuators attached and no access to any additional info...co-operation in this regard was also significantly lacking. However, some progress occurred at the end of the month as six additional new actuators were ordered via Prof Stopforth's contacts which would hopefully get things moving along.
At this stage, we were largely restricted to reading up on the electronics on the schematic sheets of the Touch Hand 4.0...
Socket Attachment
The story of the Socket attachment is an entirely separate Design project and can be found at this link.
2020 March
General
The looming CoVid19 pandemic were going to severely restrict the team's capabilities from mid-March onwards and we would be forced into an online communication and co-operation scenario - fortunately, we were able to get several things done in the Lab prior to the national shutdown towards the end of the month.
Attentions would also turn to other more urgent needs (Intubation Unit) during the shutdown period, so the Touch Hand would go onto a more measured development phase due to its longer term completion targets.
Hand Structure
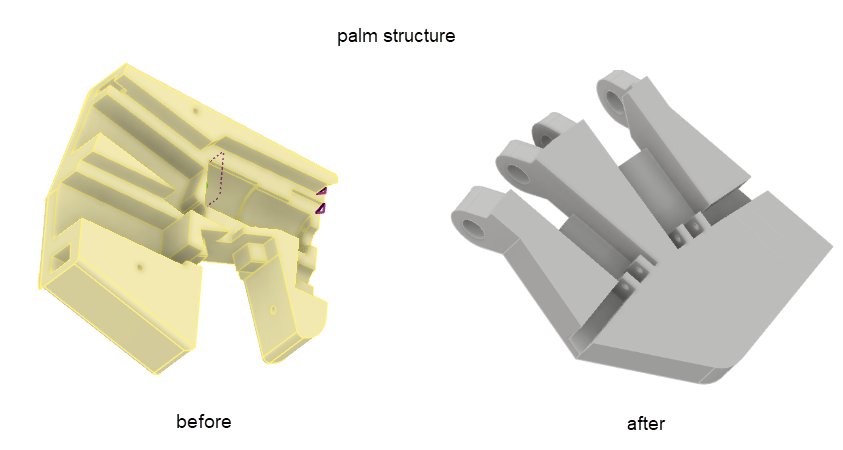
Once the initial issues with the finger complexes had been sorted, attention turned to the palm structure.
The knuckles on the palm were rotated 45º to allow the fingers to close completely into a bicycle grip, and the orientation of the linear actuators were to be changed to sort out some of the play issues initially experienced.
The main initial problem with the functionality of the hand was the significant play of the 'fingers' on basic operation, mainly as a result of the physical design and the lack of accuracy in the original 3D printed parts - the plan going forward on this was to CNC high toleranced brass bushings and aluminium pins - this would occur later down the line once the initial geometrical changes were completed.
In addition, changing the orientation of the linear actuators was carried out to facilitate a smoother arc of movement, and looking at various concepts of accommodating this motion.
At this stage, further sculpting of the palm surface profile was also started to produce a more effective 'gripping' profile for the tasks that the hand would have to perform.
Wrist Structure
With focus on the hand structure components being rectified to produce the correct actuation, development on the wrist structure was limited to printing out the most workable concepts to get an eyes-on to possible problem areas.
The next step forward would be the integration of the wrist into the socket and the hand structure.
Electronics & Control
A meeting regarding VR opportunities at the NMU Medical School fortunately introduced us to Gideon Burger of Axiology Labs, one of whose main interests is physiological responses through sensors and bespoke PCBs to interpret that data. The discussion expanded into the Touch Hand project and the problems encounted with the EMG sensors iro noisy data - Gideon very kindly agreed to assist and send down one of their Bitalino boards to see whether this would aid the project, as well as offering his technical advice going forward.
Progress was also finally being made in acquiring the existing electronics and code so that some sense could be made of it, so things were moving forward in the most crucial area of the project.
Another huge asset was achieved with Zain Imran coming on board - Zain was working at Propella (NMU's Incubator) on his own start-up Hedge SA, one of his project's being a Ventilator project that has rightly recently received much publicity within the CoVid19 response. Zain's experience was in the area of controls and programming so would be instrumental to the project moving foward. Various initial ways forward were discussed with the elctronics as well as exploring the MATLAB API within the Bit board.
To get an idea of the current status, an investigation into the initial actuation of hand iro opening & closing was simulated with a potentiometer for muscle contractions on a StM Microprocessing board - see the video below.
2020 April
General
Progress in April was to be severely restricted as a result of the national CoVid19 shutdown throughout the entire month, but the team was still able to make really good progress in their respective sectors working remotely; meetings were restricted to purely online as was co-ordination and co-operation in developing the entire structure.
Hand Structure
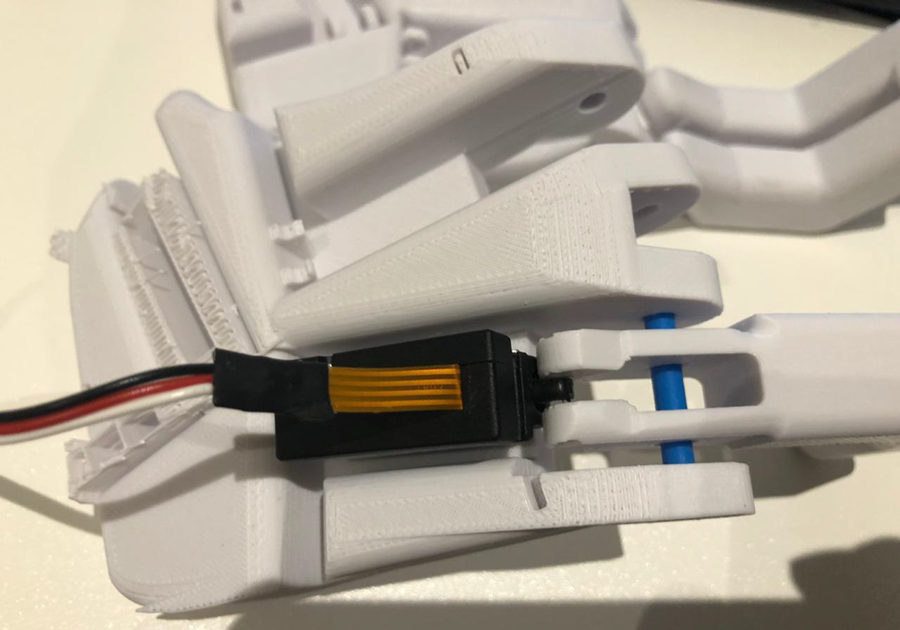
Changes to the palm structure included reorientating the Linear Actuators wells to try and get rid of play issues experienced - a quick 3D print and assembly was carried out to test whether this update had fixed the issues.
Further sculpting of the palm was carried out to give the palm greater functionality in gripping objects, as well us giving the hand an aesthetically pleasing and organic look. Again, a further 3D print was carried out on the completed hand assembly using new actuator positions, knuckle links and pins.
The outcome was that the play issue on the actuator was solved, however this cascaded into another problem; the allowing of the actuator to pivot on one end introduced too many movable points and no ground which caused the finger to move out of position...ie. a new type of play has been inadvertantly introduced.

This issue would be solved by simply doing away with the knuckle link, so that the actuator connected directly to the finger using a single link, a basic simplified bell crank system.
This fix solved our play issues, however we realized that the finger now cannot move to a fully crunched position due to issues with the mechanical advantage and pivot points of the link attaching actuator to finger. The next step forward in the design iteration would be to fix this issue.
Wrist Structure
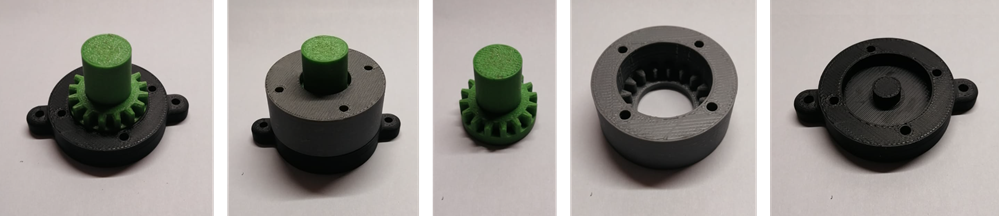
An adaption on concept 3 was finally decided upon. The multi-splined pin was still to have multiple locking positions; however, there was a reduction of lockimg positions from 16 to 8.
These locking positions give the amputee pilot additional locations to reorientate the hand to. It is still spring loaded with the spring moved to underneath the splined pin and enclosed by the cap, as after careful consideration, this position would result in less interference. The cap will be molded into the hand to make the design more aesthetically pleasing.
The wrist mechanism also had to be incorporated into the hand to make it more compact and aesthetically pleasing.
Most prosthesis wrist connections take up a lot of space and is therefore uncomfortable to wear as the length will differ from the other arm. This was the biggest difficulty that had to be overcome.
We chose a simple spring-loaded pin mechanism with 8 iterations as this was the simplest and most reliable solution. The wrist was internally re-designed so that the cylindrical female part flowed into the hand and create a more “life-like” wrist - this also consolidated the number of parts in the whole structure. This was then molded into the hand structure to reduce the extra space traditionally used by 20mm compared to the original design.
The next step in this design would be the design of the socket that connects the hand, via a spline on the male part of the wrist mechanism, to the arm.

Electronics & Control
Further progress on the electronics side was very dependant on some of the structural issues being sorted out, so progress in this area lagged slightly as a result.
Familiariaztion of the electronic components and sensors became a priority before commiting to anything, and while the team had already managed to get the motors to actuate, the next step would be interpreting existing code to see what was useable and to integrate the EMG sensors with the actuators and the force sensors.
This would accelerate up during May...
Wrist Attachment
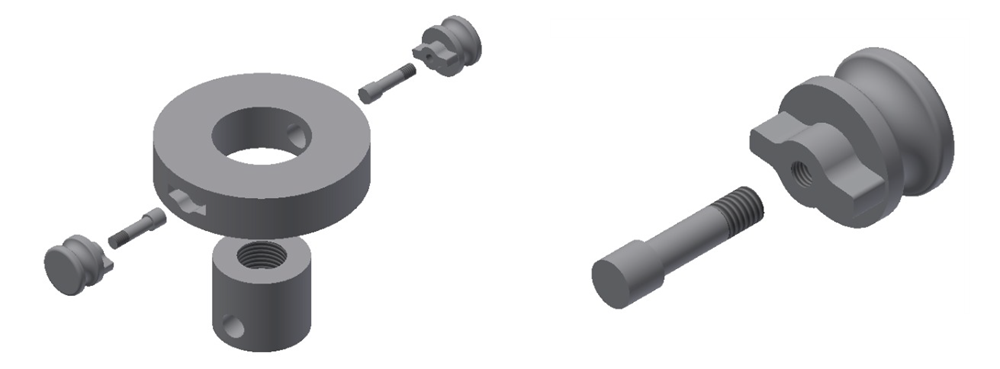
Focused time was spent on developing the socket interface - this version of the hand and wrist will lock by means of a spring-loaded pin on either side of the socket.
The pin is attached from the inner bore as there is a ridge to hold the spring in place. The locking pin will be screwed into the pin head with the thread being cut after printing to ensure accuracy. The locking pin will get a spring and then placed into the socket; the pin head is then screwed on to keep the pin in place.
The pin is released by pulling the spring-loaded pin and twisting it to keep it released. This assists the person using the hand, as they will only be able to operate it via their free hand when attaching and removing the hand.
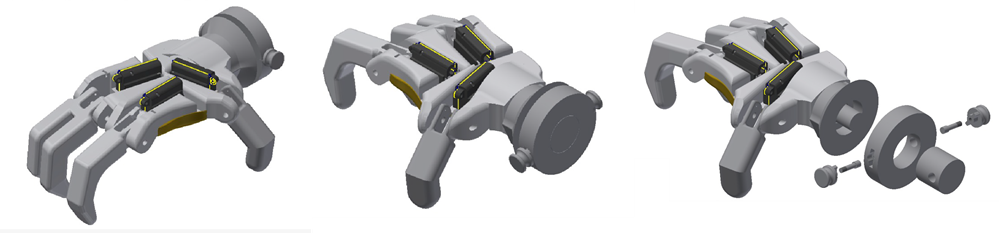
The updated full assembly with integrated wrist and socket is depicted below...
2020 May
General
The national shutdown continued into May so again everyone was working remotely from each other, which made things challenging but still, good progress was being made.
Electronics & Control
further content to be added soon...
Hand Structure
further content to be added soon...
Wrist Structure
The previous socket design had location pins that stuck out by about 10mm; this created a problem because there was a danger for these to snag onto things. The design was further modified with a quick latch system so there was no gap between the wrist and the socket.
The wrist was made smaller to accommodate the extension of the socket for locating slots, which accommodate the easier location of the hand into the socket.
2020 June-October
General
The national shutdown would be effectively extented iro University activities for the remainder of the year, so the team were resigned to fact that we would be completing the project remotely - this would be a huge task as this would have to involve a fully functional structure to be used in competition.
Electronics & Control
further content to be added soon...
Hand Structure
further content to be added soon...
2020 November 09-16 - 2020 Cybathlon
Travel Up
The last weeks prior to the 2020 Cybathlon were a blur - organised chaos between UKZN and ourselves, as Riaan strived to complete last-minute Logistical issues in the midst of a CoVid shutdown, and we were beset by trouble-shooting irritating little issues; before we had time to process it, we were on the plane and flying to Durban.
Media
All the media from the event that we are aware of are listed below:
Contributors
Huge thanks & appreciation must go out to all these individuals for their completely selfless contribution to this, be it for information, advice, their time, their contacts, their services, or whatever contribution they made, no matter how big or small.
AEDG Team (Clive Hands, Dr William Rall, Zaahid Imran, Jode Fourie, Daniel Trask, Sthuthi Varghese, Blessed Tembo, Charl Rossouw, Zain Imran)
Altair (Nic Minnaar)
VWSA (Lungile Dick, Liza Wilmot)
Jendamark (Yanesh Naidoo, Charl Rossouw)
NMU (Prof Theo van Niekerk)
eNtSA (Prof Danie Hattingh, Amy van Gend, Andile Msimang)
Livingstone Hospital (Dr Bryan Theunissen)
Custom Works (Arno Seyfert)
Stopforth Robotics Laboratory (Prof Riaan Stopforth)
Axiology Labs (Gideon Burger)
Nicky Roote Physiotherapy (Nicky Roote, Micha Cronje)