Design and Development of Electrically Efficient Propulsion System for Prototype Vehicle
This project was carried out by Chris Abraham for his Final Year Mechatronics Design Project and involved the conceptualization, design & installation of a swappable modular electric drive for possible integration into the NMU Eco-Car.
The project was set up to evolve the NMU Eco-Car in a new direction following several years of success with an IC engine drive…this in light of the global move to electric drive as well as the current establishment of a significant electric drive capability at the NMU via the Uyilo group.
It had been identified that the previously used petrol ICE propulsion system of the Eco-Car vehicle had limited efficiency and the team therefore wanted to redesign the drive system to one that would be more efficient than the ICE option.
In order to align with modern trends in the vehicle sector and to open future research opportunities, an electric powertrain was selected.
An electric drive was to be designed with system requirements as laid out below.
System Requirements:
|
Grouping
|
Technical Performance Measure
|
|
Electronic Controller
|
-
interface with communication bus to existing telemetry device on vehicle.
-
robust response to EM noise.
-
throttle Input.
-
variable PID parameters, optimized.
|
|
Power Electronic Converter
|
-
4 Quadrant Operation.
-
rated for peak motor current.
|
|
Transmission
|
-
optimize gear ratio for efficiency
-
must connect to exisiting bicycle hub
|
|
Electrical Housings
|
-
must secure electronics against EM noise and mechanical vibrations
-
visible without removing cover
|
|
Overall System
|
-
50% weight savings minimum
-
efficiency of 660 km/l equivalent petrol (7.41 kWh per litre)
-
ready for next attempt within 10 minutes of returning from previous attempt.
-
conform to all safety rules outline in the SEM rulebook.
|

Design Process:
The following process was followed to develop the system, and at the end of the process, a working prototype was built, assembled & installed into the Eco-Car ready for track testing.
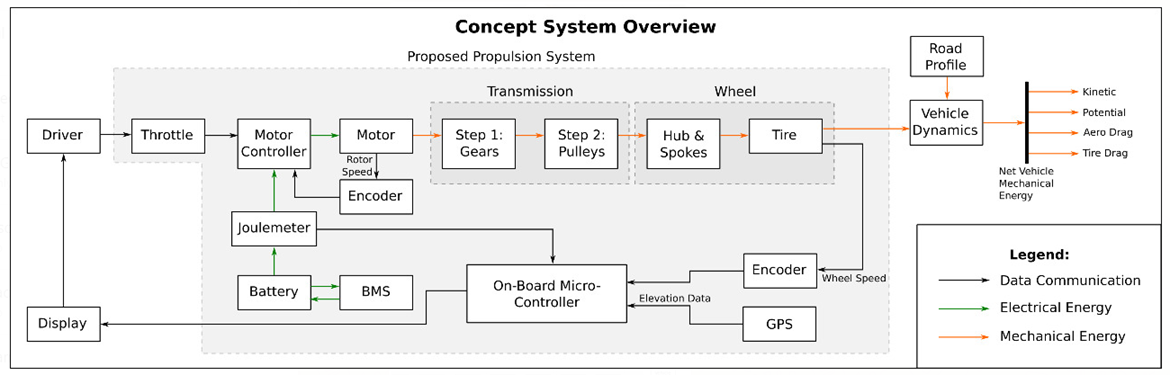
-
setting up a systems-level design of the chosen propulsion system.
-
detailed mechanical and electrical designs which optimize high efficiency and low weight.
-
dynamic models for basic simulations of the propulsion system.
-
optimizing the control system for the SEM-SA racetrack.
-
developing a safety system to maintain safe mechanical and electrical limits (including BMS).
-
constructing and assembling the physical system.

Testing and Results:
The completed installed drive was tested on a racetrack to validate that it worked. Thereafter, it was tested on a dynamometer to evaluate performance under various torque loads and under various speeds.
-
Track Testing
-
The car was tested at the local Celso-Scribante Go-Kart Track, where it obtained an efficiency of 240 km/kWh.
-
Dynamometer Testing
-
a dynamometer was designed and the drive was tested under various loads.
-
by varying the mass on the belt, the belt friction could be varied, thus exerting various resistive torques.
-
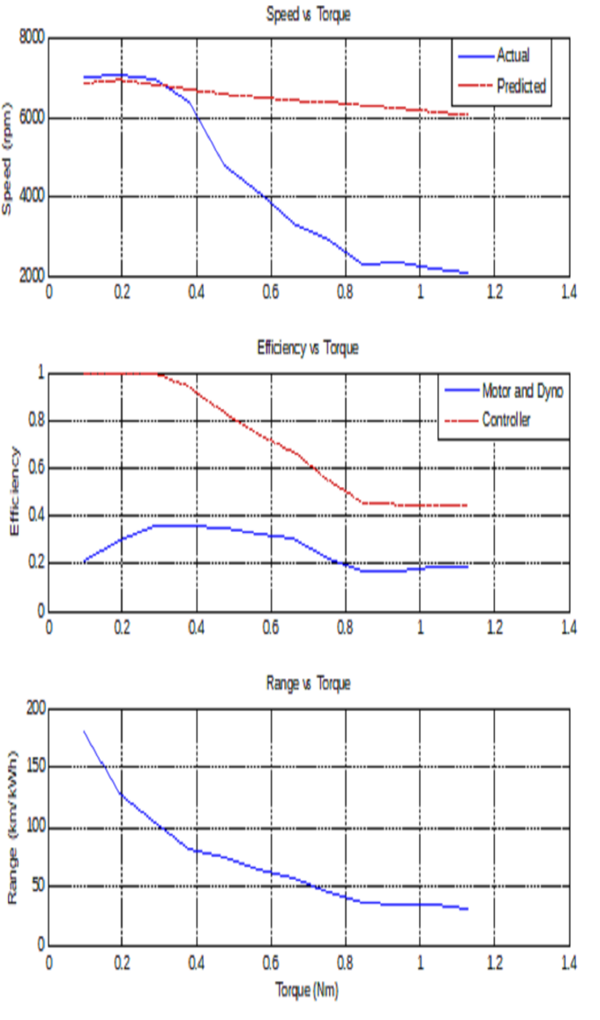
speed, efficiency and range vs torque outputs are shown below, and can be compared to the motor curves datasheet.
-
Observations:
-
the speed less than expected and motor controller efficiency drops rapidly after 0.3 Nm.
-
motor efficiency followed similar trend to expected.
-
overall score tends towards over 200 km/kWh as torque tends towards 0 Nm; this is equivalent to 1482 km/l.
Conclusions:
Key design decisions:
-
motor (less eddy currents, winding inductance, inertia, and cogging torque of DC coreless brushed).
-
motor controller (flexibility of open source firmware for tuning dynamic characteristics and possibility for alternative control strategies).
Modelling of system done to obtain motor characteristics.
Modelling of various motors done to match peak efficiency to these characteristics.
The testing conducted after the design and build of the project helped verify the model.
Going forward, additional work is needed to make the testing process more reliable, perhaps by using a better configured motor controller, to avoid the unexpected underperformance in speed.
The results did however show that the system is significantly better than the previous petrol engine in terms of equivalent energy efficiency.